Over the past few days, Elon Musk has made several statements that claim that autonomous driving systems that use lidar and radar sensors are more dangerous than Teslas only camera inspection because the system becomes confused when interpreting data from different sensors.
It’s not only fake, Musk told me directly that he agreed that radar and vision could be safer than just vision just after tesla removed the radar from its vehicles.
Tesla has taken a controversial approach by using only cameras as sensors to run input into its self -driving technology. In contrast, most other companies use cameras in connection with radar and Lidar sensors.
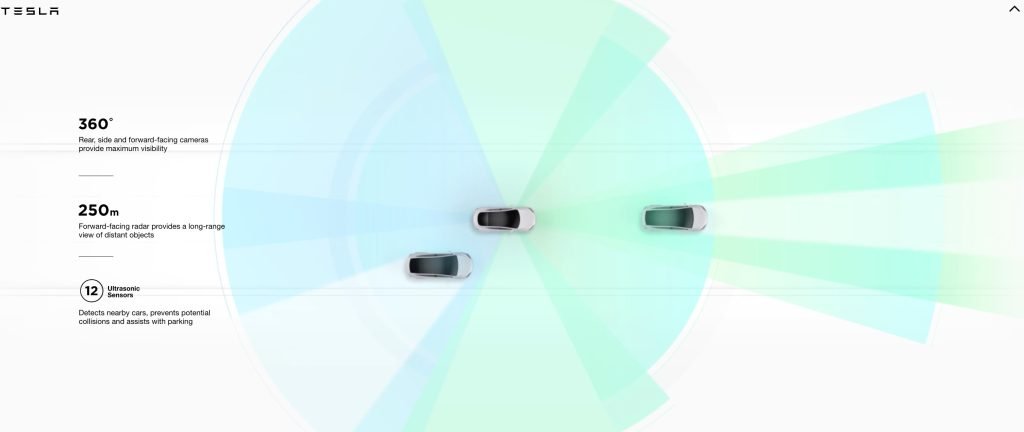
When Tesla first announced that all its cars that were produced further have hardware capable of “full self-driving” up to level 5 autonomous capacity in 2016, it included a front-facing radar in its self-driving hardware suite.
By 2021, after not achieving anything more than one level 2 driver assist (ADAS) system with his self -driving effort, Elon Musk announced a step that he called “Tesla Vision”, which consists of moving Tesla’s self -driving effort only to use input from cameras.
Here’s what I wrote in 2021 about Musk that shared its plan for Tesla to use only cameras and neural nets:
CEO Elon Musk has hyped only the vision update as “Mind-Blowing.” He insists that it will lead to a true level 5 autonomous driving system at the end of the year, but he has got that timeline wrong before.
In May 2021, Tesla had started removing the radar sensor from its set -up, starting with model 3 and model Y, and later Model S and Model X in 2022.
Tesla engineers allegedly tried to convince Musk to maintain the use of radar, but CEO disregarded them.
We are now in 2025, and contrary to what Musk claimed, Tesla has not yet delivered his self-driving promises, but the CEO is doubled on his vision-only approach.
The controversial billionaire is making headlines this week for a number of new statements that attack Tesla’s self-driving rivals and their use of radar and lidar sensors.
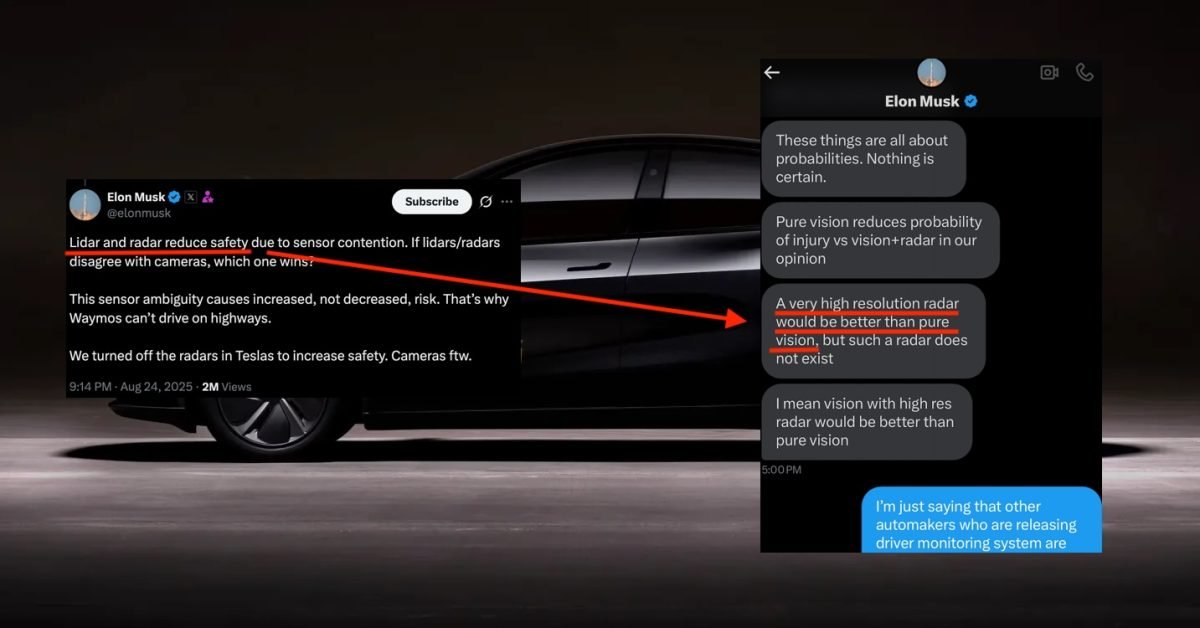
Earlier this week, Musk took a jab at Waymo and claimed that “Lidar and Radar reduced security”:
Lidar and radar reduce safety due to sensor improvement. If Lidars/Radars disagree with cameras, which one wins it? This sensor -clue results in increased, not reduced, risk. Therefore, Waymos cannot drive on highways. We turned off radars in Teslas to increase safety. Cameras FTW.
The claim that “Waymos can’t drive on highways” is simply false. Waymo has completed full driverless staff testing on highways in Phoenix, San Francisco and Los Angeles for years, and it is expected to make this technology available to Rider-Rides soon.
Tesla is in a similar situation with its Robotaxi: They are not driving on highways without an employee supervisor.
Musk later added:
Lidar also doesn’t work well in snow, rain or dust due to reflection spread. Therefore, Waymos stops working in any heavy rainfall. As I have said many times, there is a role for Lidar in some circumstances, and I personally monitored the development of Lidar for SpaceX Dragon Docking with space station. I am well aware of its strengths and weaknesses.
It’s not true that Waymos cannot function in “any heavy rainfall.”
Here is a video of a Waymo vehicle running by itself in heavy rain:
By comparison, Tesla’s own Robotaxi terms limited or unavailable in bad weather. “
Last month, Tesla Robotaxi riders received their rides and they were told that it was due to the rain.
There is plenty of evidence that Musk is wrong and misleading with these statements, but in addition he even admitted that radar sensors can make Tesla’s vision system more secure.
‘Vision with high resolution radar would be better than pure vision’
In May 2021, when Tesla began removing radar sensors from its vehicle lineup and switching to a vision-only approach, I was directly messaging (DMing) Musk to learn more about the surprising feature.
In the conversation, he already made the claim that the sensor connection lowers security, as he made this week in new comments attacking Waymo.
He wrote at the time:
The probability of security will be higher with pure vision than vision+radar, not lower. The vision has become so good that radar actually reduces signal/noise.
What was more interesting, though, is what he said shortly after claiming that:
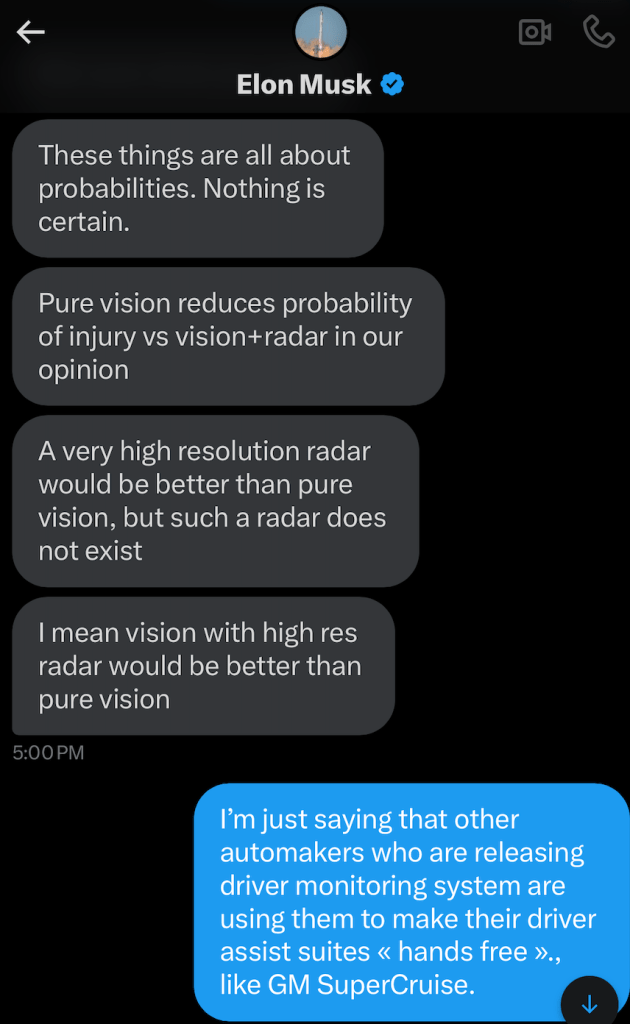
Musk admitted that “vision with high resolution radar would be better than pure vision”. However, he claimed that such a radar did not exist.
In the same conversation, I pointed musk to existing high-definition millimeter wave radars, but he didn’t answer.
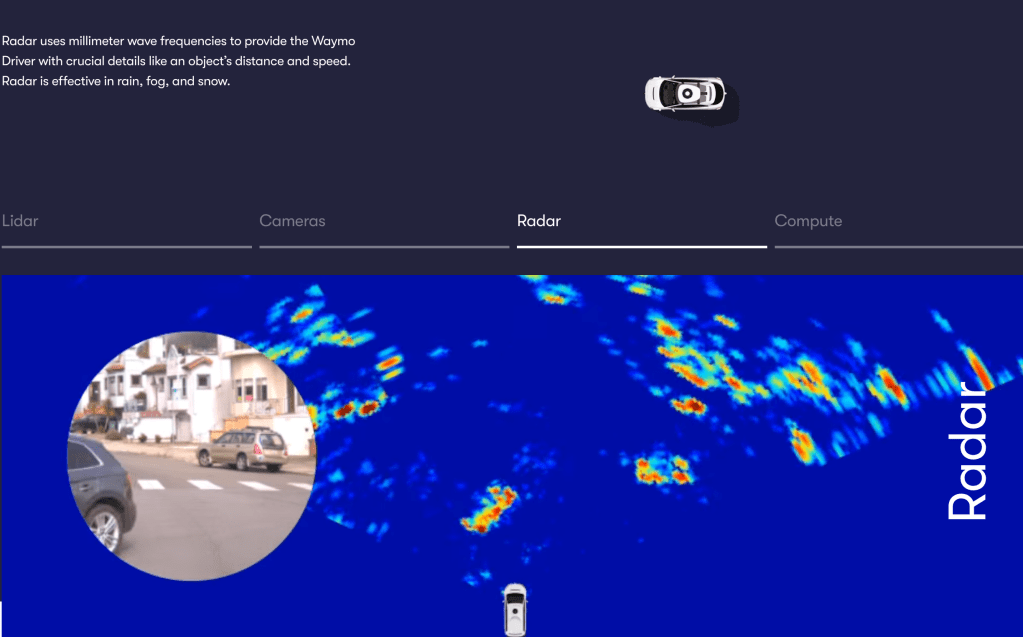
It was still early for this technology in 2021, but high-definition millimeter wave radars are now often used by companies that develop autonomous driving technologies, including Waymo.
Waymo uses six high-definition radars in its system:
In short, Musk was already worried about sensor improvement in 2021, but he admitted that the problem would be worth solving with radars with higher reductions that already existed back then and becoming more common now.
Still, he criticizes companies that use Radar and Lidar that work in the same way as high resolution radars, but at different wavelengths, to even try sensor fusion.
It’s not impossible because Tesla can’t do it
Part of the problem here seems to be that Musk thinks something is not working because Tesla can’t make it work and he won’t admit others to solve the sensorfusion problem.
Tesla simply could not solve sensorfusion, so it focused on achieving autonomy solely through camera views. However, those who continued to work on the question have made significant progress and are now reaping the benefits.
Waymo and Baidu, both of which have level 4 autonomous driving systems currently operating operating without supervision, unlike Tesla, have heavily invested in sensorfusion.
Amir Husain, an AI entrepreneur who sits on the boards of advisers for IBM Watson and the Department of Computer Science in UT Austin, points for progress in the use of Kalman -Filters and Bayesian techniques to solve Sensorwear Kovarians.
He commented on Musk’s statement of the use of radar and lidar sensors:
The problem is not a binary disagreement between two sensors. It generates a better estimate than any individual sensor can produce on your own. They all have a margin of error. Fusion helps reduce this.
If Musk’s argument was kept, why should the human brain use eyes, ears and touch to estimate object placement? Why should aircraft combine radar, irst and other passive sensors to estimate object placement? This is a fundamental misconception of information theory. Each channel has noise. But redundancy reduces the uncertainty.
Musk’s main argument about focusing on cameras and neural nets has been that roads are designed for humans to drive, and people drive using their eyes and brain, which are hardware and software equivalent of cameras (eyes) and neural nets (brain).
Now, most other companies that develop autonomous driving technologies also focus on this, but to surpass people and achieve greater security levels through precision and redundancy, they also add radar and lidar sensors to their systems.
Electek Tag
Musk painted Tesla in a corner with his visible approach, and now he tries to mislead people to believe that it is the only one that can work when there is no significant evidence to support this claim.
Now let me be clear, Musk is partly correct. When it is poorly melted, Multisensordata introduces noise, making it more challenging to operate an autonomous driving system.
Who said, however, that this is an insoluble problem? Others seem to solve it, and we see the results in Waymo’s and Baidus commercially available taxi services for rider.
If you can take advantage of Radar’s ability to detect distance and speed as well as work through rain, fog, dust and snow, why wouldn’t you use it?
As he admitted to DMS with me in 2021, Musk is aware of this-why he acknowledged that high-resolution radar combined with vision would be safer than the sight alone.
The problem is that Tesla has not focused on improving sensor fusion and radar integration in the last 4 years because it has been all-in on vision.
Now Tesla could potentially still resolve self-driving with its vision system, but there is no evidence that it is close to happening or any safer than other systems, such as Waymo’s, using radar and lidar sensors.
In fact, Tesla still only runs an autonomous driving system under the supervision of cars in cars with a few dozen cars, while Waymo has been doing rider rides for years and operates over 1,500 autonomous vehicles in the United States.
As with his “Robotaxi” with supervisors, Musk is trying to create the illusion that Tesla not only leads in autonomy, but it is the only one that can solve it.
FTC: We use income that earns Auto -connected links. More.